Overview
This project involved the complete design and analysis of a self-propelled buoy capable of autonomous operation in dynamic marine environments. The goal was to ensure optimal stability, maneuverability, and resistance characteristics under real-world conditions.
Approach
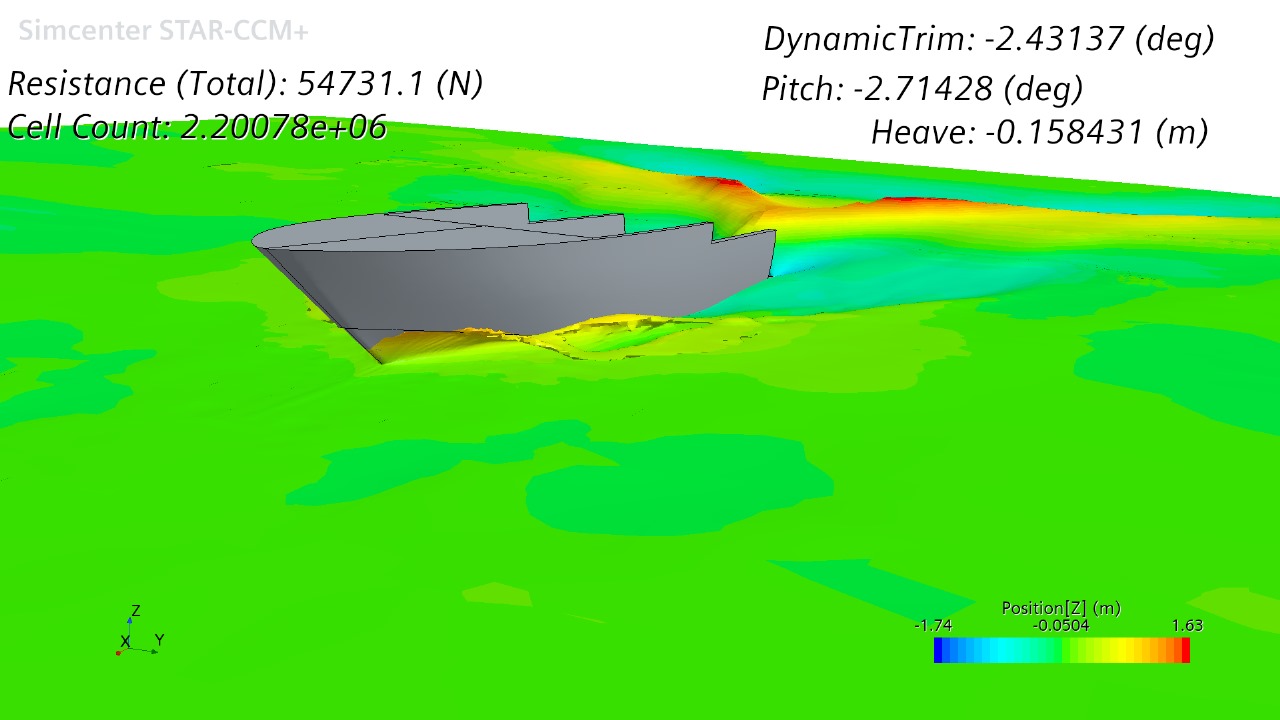
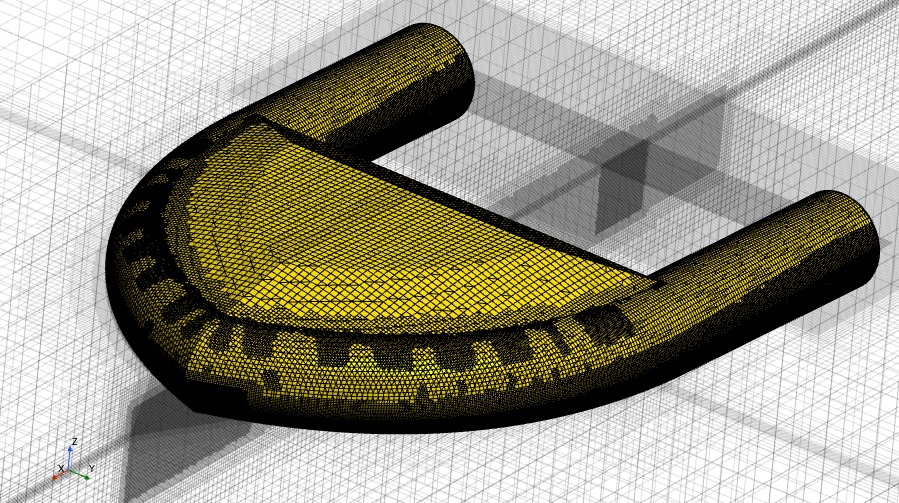
A detailed 3D model of the buoy was developed using SOLIDWORKS, capturing all geometric and propulsion features. Hydrodynamic analysis was performed in STAR-CCM+, simulating all six degrees of freedom (surge, sway, heave, roll, pitch, yaw) to evaluate motion response under waves, wind, and currents.
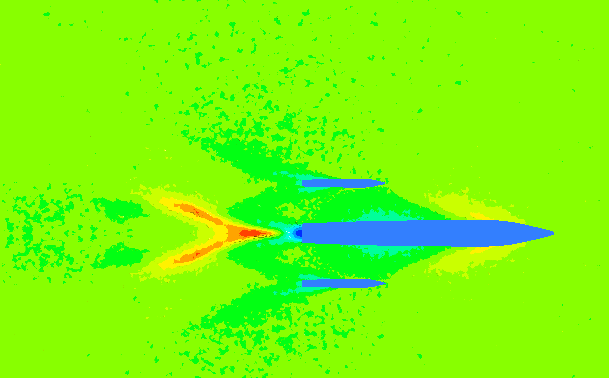
The study included drag and lift force evaluation, vortex shedding patterns, and potential resonance behavior to optimize the buoy’s shape and propulsion system.
Software & Tools
- SOLIDWORKS (3D CAD)
- STAR-CCM+ (CFD with 6DOF simulation)
- VOF for surface tracking and transient flow analysis
Key Outcomes
✅ Stable 6DOF motion in wave environments
✅ Optimized geometry for minimal drag
✅ Validated performance and seakeeping in harsh marine conditions